 |
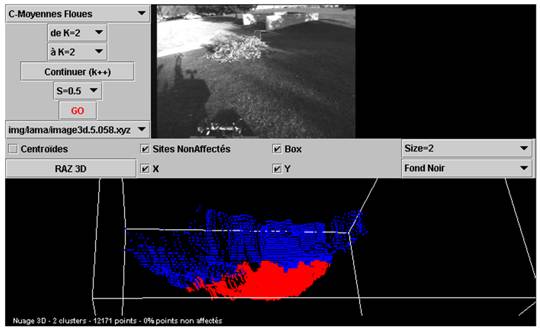
Type d’algorithme utilisé Nombre de partitions au départ Nombre de partitions maximal Continuer au delà Niveau du seuil de défuzzyfication Lancement du partitionnement Choix du fichier Nuage de points à charger |


|
Affichage des centroides des partitions Remise à zéro du point de vue Affichage des sites affectés à aucune des partitions Blocage de l’axe X de la souris Affichage de la boite contenant le nuage Blocage de l’axe Y de la souris Taille des points affichés Couleur du fond de la visualisation 3D |


| [MAIL] [SITE PERSO] [màj:25/07/2003] |